Robotic Crane
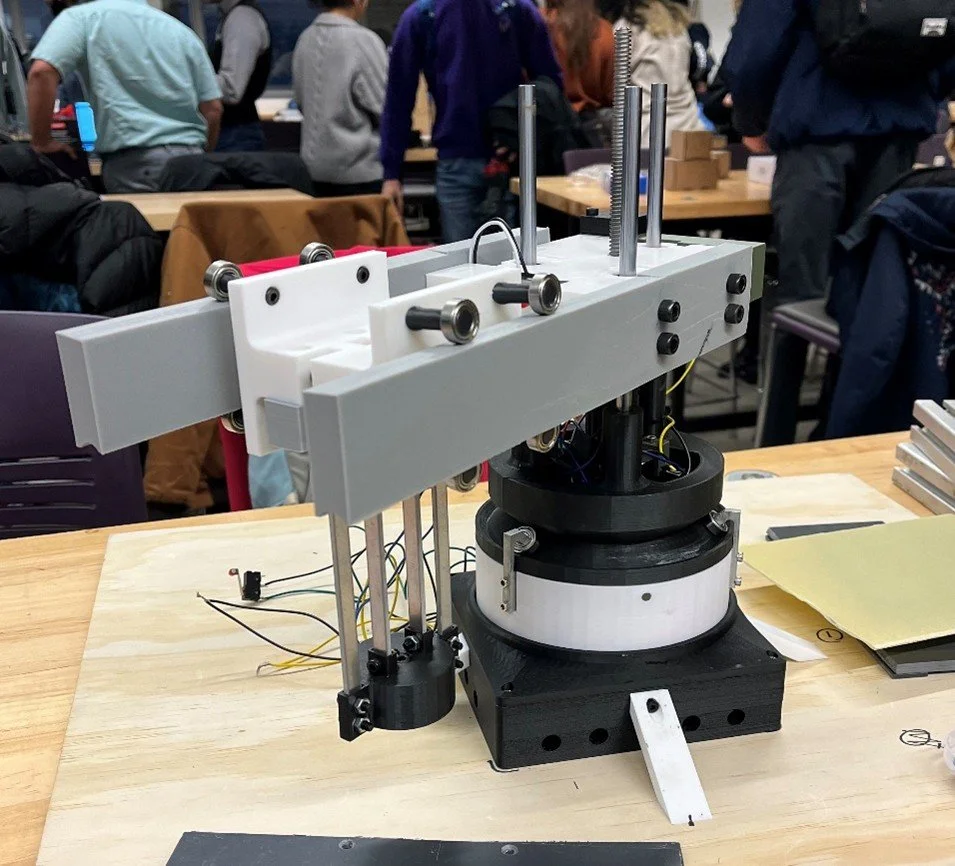
This project was designed and built to fulfill the design project requirements of ME380. The crane utilizes an electromagnet to grasp ferrous objects and autonomously moves them to one of two predetermined locations.
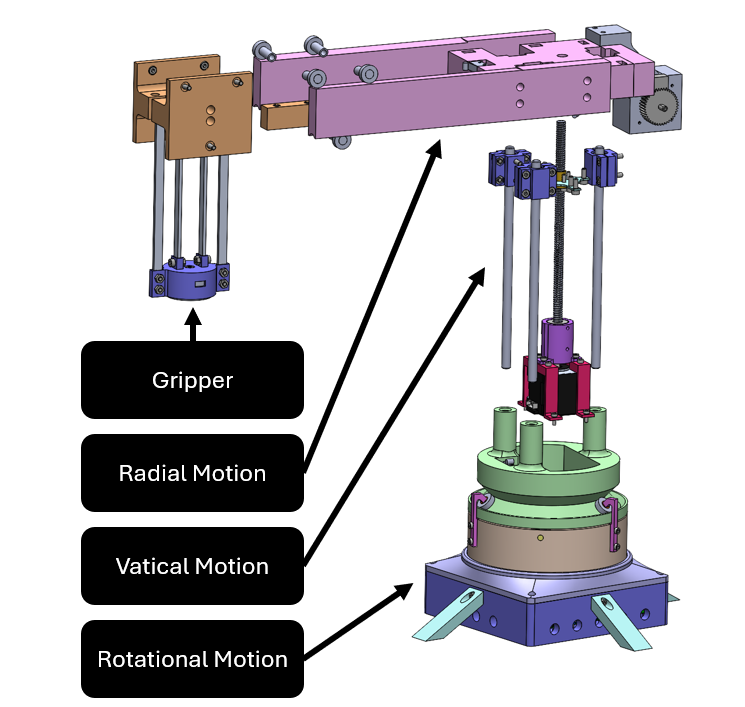
Subassemblies
Gripper
Fixes the electromagnet to the crane
Radial Motion
Provides radial motion functionality through a cart-track system
Vertical Motion
Provides vertical motion functionality through a lead screw
Rotational Base- Owned by me!
Provides a sturdy base and rotational motion functionality through a gear reduction
Rotational Base Key Features
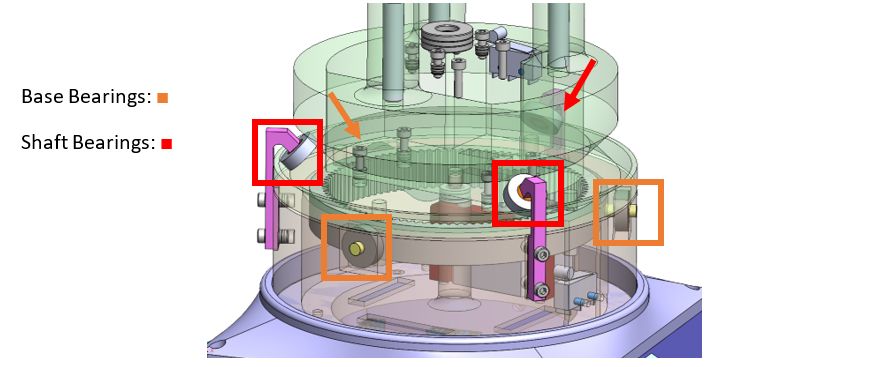
1 Degree of Freedom
The only DOF that is permitted by the Base and Shaft Bearings is rotation about their axes, which confines the assembly exclusively to rotational motion.
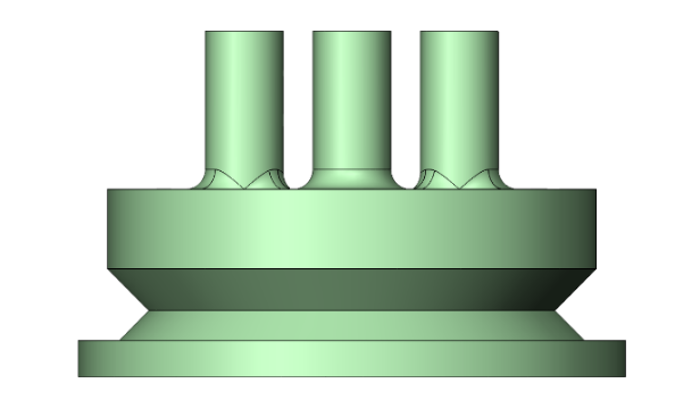
3D Print DFM
Bearing interface designed at a 45 degree angle instead of 90 degrees to permit printing with zero supports and reduce the load experienced by the bearing shafts.
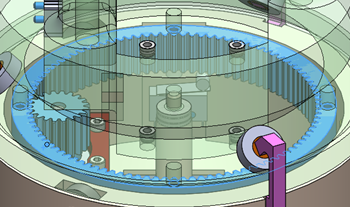
Gear Ratio
Utilized a pinion and ring gear system with a 5:1 ratio to increase torque and overcome the inertia of of the top assembly